In 3D scene generation, a captivating challenge is the seamless integration of new objects into pre-existing 3D scenes. The ability to modify these complex digital environments is crucial, especially when aiming to enhance them with human-like creativity and intention. While adept at altering scene styles and appearances, earlier methods falter in inserting new objects consistently across various viewpoints, especially when precise spatial guidance is lacking.
Researchers have introduced ETH Zurich and Google Zurich InseRF, groundbreaking techniques developed to address this challenge. InseRF innovatively uses a combination of textual descriptions and a single-view 2D bounding box to facilitate the insertion of objects into neural radiance field (NeRF) reconstructions of 3D scenes. This method significantly deviates from previous approaches, predominantly characterized by their limitations in achieving multi-view consistency or constrained by the need for detailed spatial information.
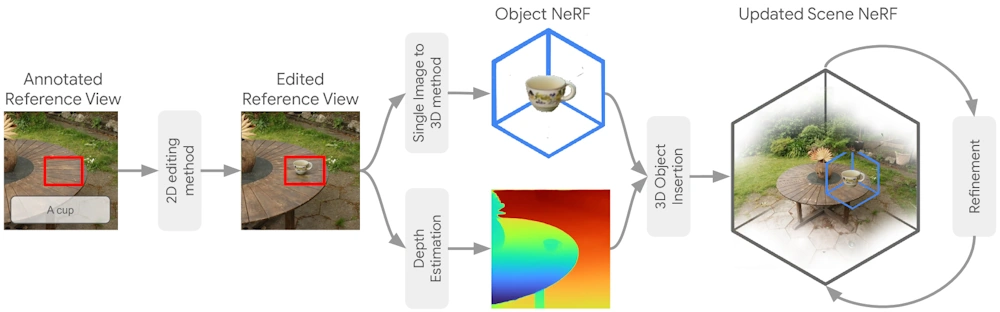
The core of InseRF’s methodology is a meticulous five-step process. The journey begins with creating a 2D view of the target object in a chosen reference view of the scene. This step is guided by a text prompt and a 2D bounding box, which collectively inform the spatial placement and appearance of the object. Using sophisticated single-view object reconstruction techniques, the object is lifted from its 2D representation into the 3D realm. These techniques are informed by large-scale 3D shape datasets, thus embedding strong priors over the geometry and appearance of 3D objects.
InseRF harnesses the power of monocular depth estimation methods to estimate the depth and position of the object relative to the camera in the reference view. An intricate process of scale and distance optimization is then undertaken to ensure that the object’s placement in 3D space accurately reflects its intended size and location per the reference view.